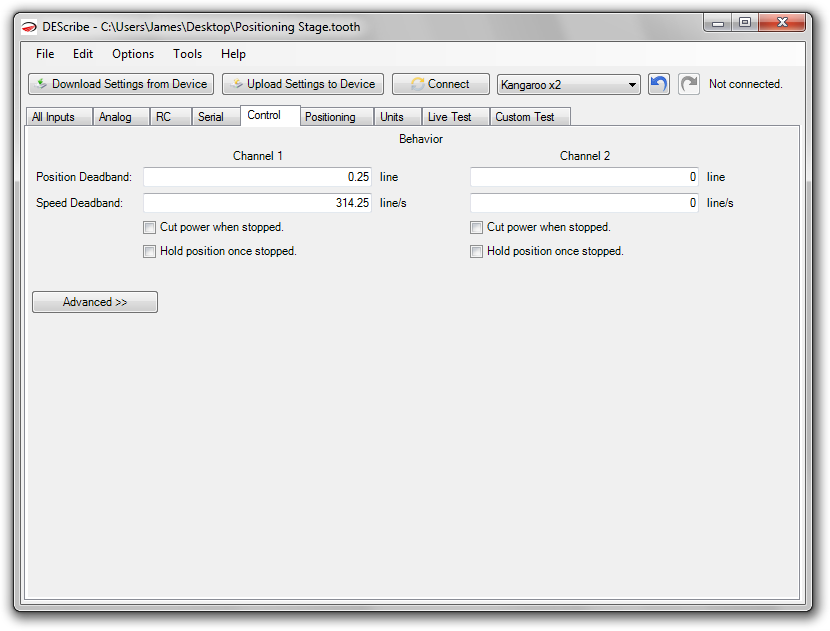
Position Deadband
When the difference between measured and desired position is below the deadband, the controller considers itself 'in position' and does not try to get closer.
It may be desirable to increase this if your motor has significant problems with cogging.
Speed Deadband
When the difference between measured and desired speed is below the deadband, the controller considers itself 'at speed'.
Speeds slower than the deadband speed are considered stopped.
Cut power when stopped.
If your system cannot be back-driven, you can save energy by cutting power when stopped.
Hold position once stopped.
In Speed Control mode, the controller will hold position at the stopping spot instead of holding speed at zero.