Ramp Time
This is the time the driver takes to go from full reverse to full forward or vice versa. High ramp rates give a slower-acceleration, softer feel.
If you have a Kangaroo connected, keep this set to 0.000 s.
Deadband
This is the percent of the throttle range near the center that, if the motor driver is stopped, will cause no motion.
If you have a Kangaroo connected, keep this set to Default.
Max Voltage
Voltages above this value will cause the red error LED to go on. Regenerative braking will temporarily be replaced by hard braking to keep the voltage from rising further.
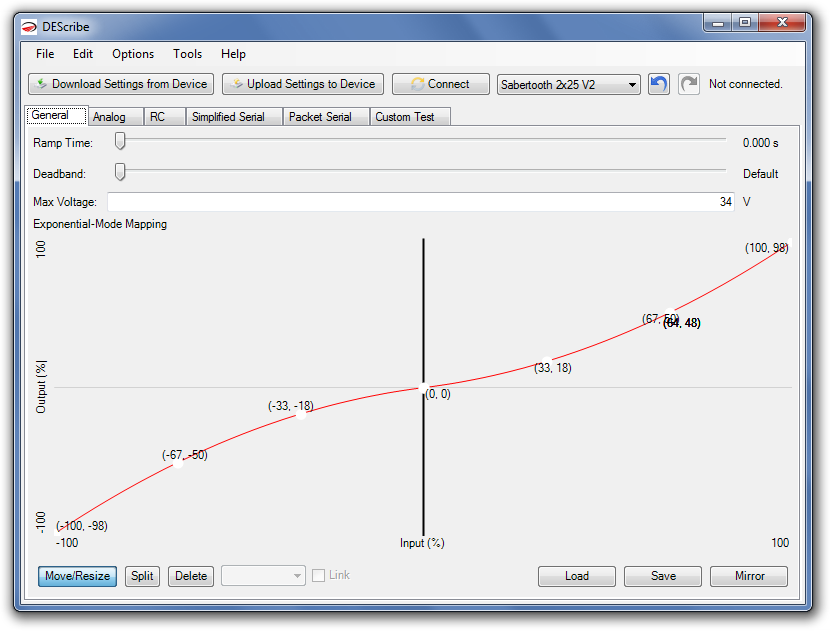
Exponential-Mode Mapping
You can alter the exponential-mode mapping curve to change how the motor driver responds to your analog or RC input, when you have the DIP Switch for Exponential Mode set.
The X axis (left-to-right) corresponds to the input, from full reverse on the left to full forward on the right.
The Y axis (bottom-to-top) corresponds to the output, from full reverse on the bottom to full forward on the top.
To give you an idea, notice in the above picture how the curve is flatter near the middle. There is a wide range of input corresponding to a narrow range of output -- changes in input near center cause only small changes in output power. The opposite is true on the sides -- changes in input near the minimum and maximum cause large changes in output power.
The shape of the curve can have a big effect on the feel of the control. Play around and see where it takes you.