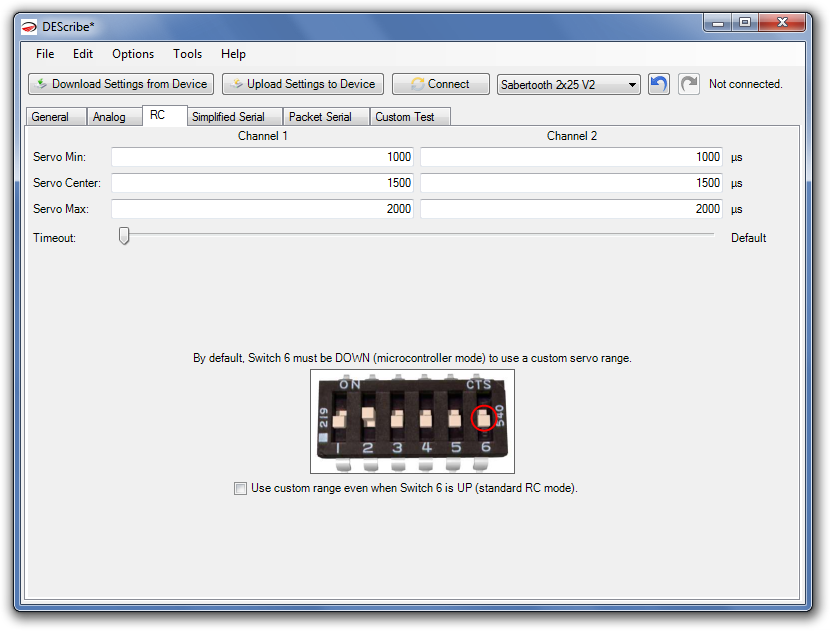
Use custom range even when Switch 6 is UP (standard RC mode)
Normally, SyRen/Sabertooth use DIP Switch 6 to determine whether to use automatic calibration or the custom range you specify on this tab. When Switch 6 is DOWN (microcontroller mode), the custom calibration is used. However, microcontroller mode also disables the signal timeout, so in this mode loss-of-signal events do not cause the motor driver to stop. If you are controlling the motor driver with RC but still want to use a custom range, then, you should use RC mode but check this option. Here's a summary of the possible configurations:
Switch 6 DOWN
custom range, signal timeout disabled (good for microcontrollers)
Switch 6 UP
automatic calibration, signal timeout enabled (good for RC)
Switch 6 UP + Use custom range even when Switch 6 is UP (standard RC mode)
custom range, signal timeout enabled (good for RC)
If you are using RC, the default automatic calibration may be what you are looking for. Here's how it works: the center is the initial stick position received from the transmitter. Full reverse and full forward are determined by the minimum and maximum positions seen, respectively. As a result, as long as you start your transmitter centered, it won't matter what your trims are set at -- centered will correspond to 'stop'.
Timeout
When SyRen/Sabertooth detects that it is not receiving a signal, it will wait this long before stopping your motors. For example, if your link occasionally goes out for, say, five seconds, then a two second timeout will cause it to stop but a ten second timeout won't.
Custom Range
If you know your transmitter's range and are using the custom range, you can enter it here.
One reason to use a custom range is if your robot lives a hard life and loses power often. In this case, if you are using automatic calibration and lose power abruptly, your robot may power back up soon after while your transmitter is not centered.