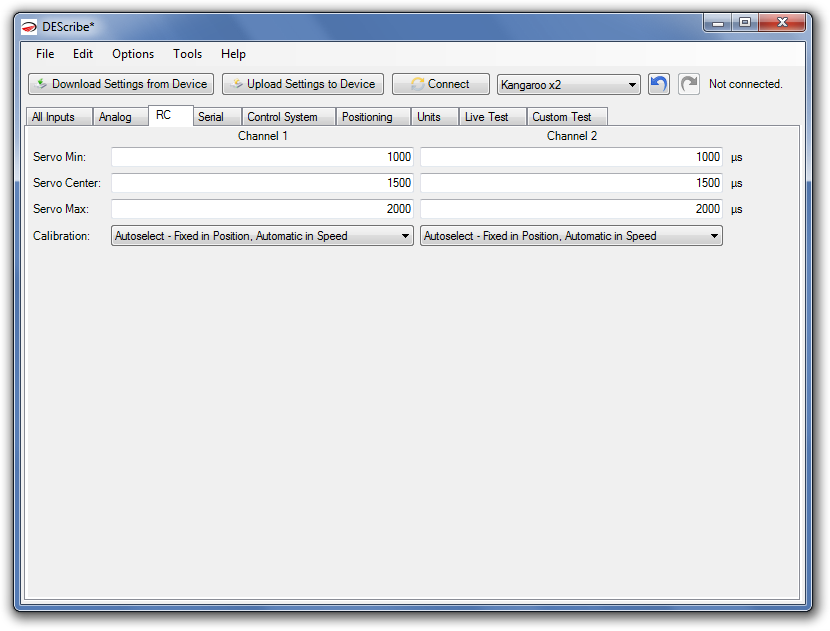
Custom Range
You can enter a custom range here. In Speed Control mode, minimum to center is reverse motion, and center to maximum is forward motion.
Calibration
By changing the calibration mode, you can customize how your Kangaroo responds to RC input. The modes are:
Autoselect
When the Kangaroo is set to Position Control mode, it uses fixed calibration. When set to Speed Control mode, it uses automatic calibration.
Fixed
The range specified in this tab is used. It does not change based on positions received from the RC transmitter.
Automatic
The center is determined by the initial stick position received from the RC transmitter. The range is determined from the minimum and maximum positions received.
Joystick
The center is determined by the initial stick position received from the RC transmitter. The minimum and maximum specified in this tab are used.