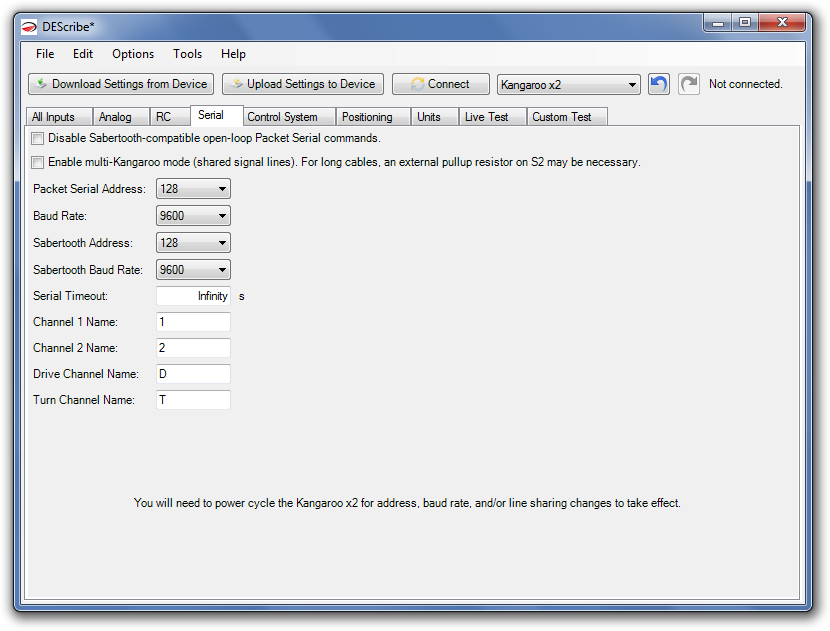
Disable Sabertooth-compatible open-loop Packet Serial commands
As far as Packet Serial data integrity goes, Kangaroo packets are protected by a 14-bit CRC, while Sabertooth packets are protected by a 7-bit checksum. Kangaroo understands both. If you require maximum resilience to signal corruption and do not need Sabertooth open-loop command support, this option lets you turn it off.
Enable multi-Kangaroo mode (shared signal lines)
When disabled, Kangaroo drives the S2 line high when it is not sending data on it, to give a stronger idle signal. One consequence is that S2 cannot be shared.
When enabled, Kangaroo will only drive S2 when it is sending data, and will enable an internal pullup resistor when it is idle. The idle signal is weaker, but S2 can be daisy-chained between them.
Packet Serial Address
Kangaroo's Packet Serial address. Multiple Kangaroos can usefully share a Packet Serial address as long as their Channel Names differ. Since SyRen/Sabertooth open-loop commands do not have a Channel Name concept, Kangaroo cannot usefully share an address with a SyRen/Sabertooth.
If you change this, the next time you power on the controller and try to connect to DEScribe, you will need to select the new address. If you later forget what you chose, don't worry -- the Connect dialog box has a Detect feature to figure it out.
Baud Rate
By default, Kangaroo uses a baud rate of 9600. A faster baud rate lets you send more commands per second.
If you change this, the next time you power on the controller and try to connect to DEScribe, you will need to select the new baud rate. If you later forget what you chose, don't worry -- the Connect dialog box has a Detect feature to figure it out.
Sabertooth Address
The address of your SyRen/Sabertooth motor driver. If DIP switches 4-6 are ON, this is 128.
Sabertooth Baud Rate
The SyRen/Sabertooth baud rate. Unless you have changed this, it is 9600.
Serial Timeout
The amount of time without receiving a new valid command or query before going into serial timeout. Physical line disconnection always causes a serial timeout.
When serial timeout occurs, Position commands hold position, and Speed commands go to zero speed. You have to issue a Start command to get out of serial timeout.
Channel Name
The letter that defines the channel. Sometimes it can be clearer to change these. Here's an example. Suppose you have four axes - X, Y, Z, and T. If you name them this way and are sharing the line between multiple Kangaroos, you can have two Kangaroos - one handling X and Y, and the other handling Z and T. You can also have three Kangaroos - one handling X and Y, one handling Z, and another handling T. In both cases the Channel Names are the same, so you do not have to change the software commanding them.